Anturit muuntavat fyysisiä suureita mitattaviksi signaaleiksi. Niiden luotettava toiminta riippuu paitsi tunnistusalkiosta myös tärkeistä varusteista, kuten koteloinnista, signaalinkäsittelijöistä, liittimistä ja kiinnitysosista. Alla kuvataan viisi tärkeää anturityyppiä, mukaan lukien niiden toimintaperiaatteet ja välttämättömät varusteet.
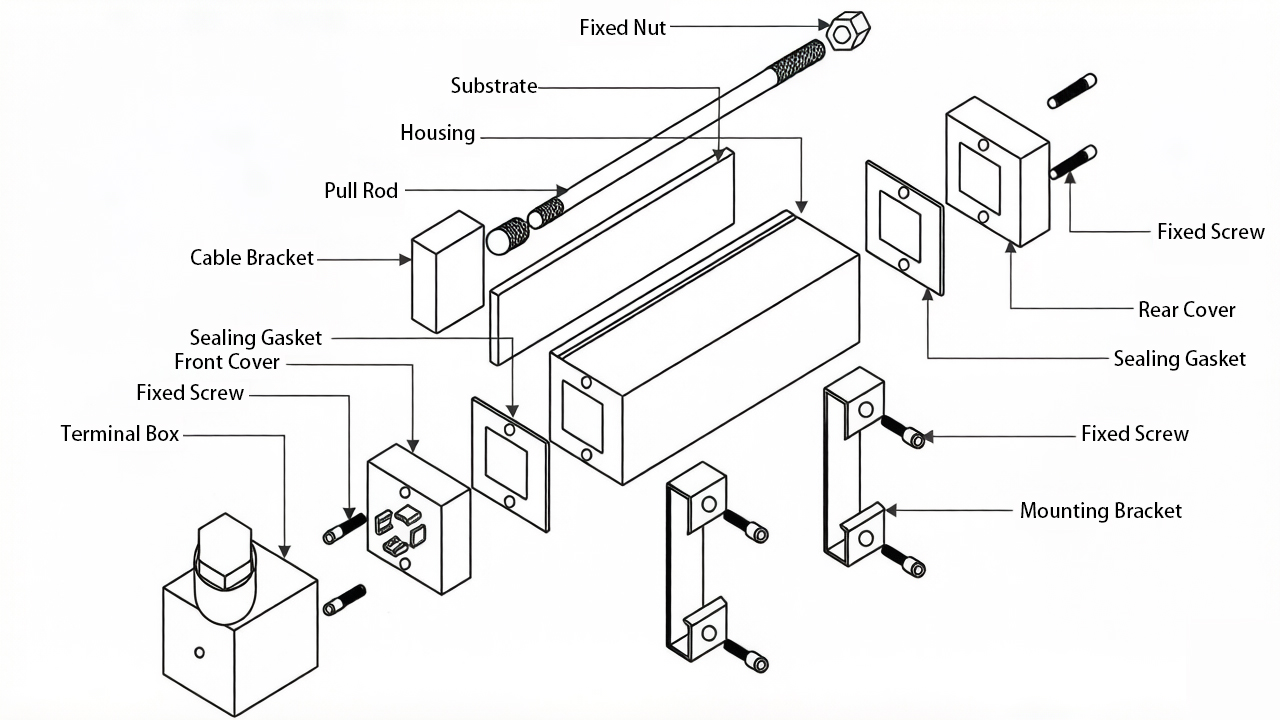
1. Lineaariset anturit (Potentiometrinen tai magnetostrictiivinen)
Toimintaperiaate: Potentiometriset lineaarisensorit käyttävät vastusjohdetta ja liukukoskettimaa. Kun liukukosketin liikkuu lineaarisesti, vastus muuttuu suhteellisesti, mikä tuottaa jännitejakajan ulostulon. Magnetostrictiivisissa sensoreissa on aaltoputki ja pysyvä magneetti; sähköinen pulssi synnyttää muodonmuutospulssin, joka heijastuu magneetin sijainnista, ja aikaviive kertoo siirtymän suuruuden.
Päävarusteet: Säänkestävät koteloit (IP67), tankovarret tai pallolaakerit mekaaniseen kytkentään, suojatut kaapelikoot ja signaalinkäsittelijät, jotka muuntavat vastuksen tai aikaviiveen 4–20 mA tai 0–10 V -ulostuloiksi.
2. Painosensorit ( Kuormasoluihin – Jännitysanturityyppi)
Toimintaperiaate: Useimmat kuorma-anturit käyttävät metallista jousielementtiä (esim. palkki-, S-muotoinen tai pannukakku-muotoinen), johon on kiinnitetty neljä venymämittaria Wheatstone-kytkentään. Kun voima kohdistetaan elementtiin, se muodonmuuttuu, mikä aiheuttaa jännitystä kahdessa venymämittarissa (vastuksen kasvu) ja puristusta kahdessa muussa (vastuksen pienentyminen). Kytkentä tuottaa millivoltsignaalin, joka on suoraan verrannollinen kuormaan.
Päävarusteet: Ruostumansuojaukseen tarkoitetut ruostumattomasta teräksestä tai seosteräksestä valmistetut koteloit, kuormanotto painikkeet ja kiinnityslevyt, liitännösruutuja useiden antureiden yhdistämiseen sekä tarkkuusvahvistimet (joissa on syöttöjännitteen säätö ja lämpötilakorjaus).
3. LVDT (Lineaarinen muuttuva differentiaalimuuntaja)
Toimintaperiaate: LVDT koostuu ensisijaisesta käämistä ja kahdesta toissijaisesta käämistä, jotka on kierretty ontossa putkessa. Ferromagneettinen ydin liikkuu lineaarisesti putken sisällä. Ensisijainen käämi saa vaihtojännitesignaalin (yleensä 1–10 kHz). Kaksi toissijaista käämiä on kytketty sarjaan vastakkaisesti; kun ydin on keskitetty, niiden indusoituneet jännitteet kumoavat toisensa (nollatuloste). Ytimen siirtyminen aiheuttaa jännitteiden epätasapainon, mikä tuottaa vaihtojännitetulosteen, jonka amplitudi on verrannollinen siirtymään ja jonka vaihe ilmaisee suunnan.
Päävarusteet: Ruostumattomasta teräksestä tai epoksiresinasta valmistetut koteloit, jotka soveltuvat vaativiin ympäristöihin, kierretyt ydinvangit ja jousikuormitettu mittaprobit, signaalinkäsittelijät, jotka demoduloivat vaihtojännitetulosteen tasajännitteeksi tai 4–20 mA:n signaaliksi, sekä liittimelliset kaapelit, joilla on alhainen kapasitanssi.
4. Väännöskulma-anturit (Reaktio- tai pyörivätyyppinen)
Toimintaperiaate: Useimmat vääntömomenttianturit käyttävät venymämittareita, jotka on kiinnitetty akseliin tai liitoslevyyn. Reaktiovääntömomenttiantureissa runko on kiinnitetty paikalleen, ja venymämittarit mittaavat kiertävää momenttia. Pyörivissä vääntömomenttiantureissa pyörivään akseliin on asennettu venymämittareita tai magneettokiteinen elementti; signaali siirretään liukurengasliitosten, induktiivisen kytkennän tai radiotelemetrian avulla. Mittareiden resistanssimuutos (Wheatstonen siltakytkentä) on suoraan verrannollinen vääntömomenttiin.
Päävarusteet: Hampaatut tai avainuraiset akselit positiivista voiman siirtoa varten, liukurengasliitokset (pyöriville malleille), langattomat telemetria-moduulit, suojakoteloitukset tiivistetyillä laakeroinnilla sekä vahvistin/käsittelyyksiköt, jotka tuottavat suodatettuja ja kalibroituja jännite- tai virtalähtöjä.
Yleiset varusteet kaikille tyypeille
Signaalimuuntimet (vahvistimet, suodattimet, lineaarisointipiirit), sähköliittimet (M12, DIN), kiinnitysvarusteet ja kalibrointityökalut ovat yleisiä monille antureille. Oikein valitut lisävarusteet varmistavat tarkkuuden, kestävyyden ja sähkömagneettisen yhteensopivuuden.
Sekä tuntemus anturin toimintaperiaatteesta että sen mukana tulevasta laitteistosta on olennaista insinöörien kannalta, jotta nämä anturit voidaan ottaa luotettavasti käyttöön teollisessa automaatiossa, ajoneuvojen testauksessa, robotiikassa ja prosessien ohjauksessa.