Undrat hur ingenjörer återskapar känslan av att köra en bil utan att lämna laboratoriet? Svaret ligger i smart teknik – särskilt användningen av linjära positionsomvandlare för att simulera verkliga körförhållanden. Dessa enheter mäter fysisk rörelse med hög precision, vilket gör dem ovärderliga för att testa fordonets dynamik, upphängningsbeteende och även förarsystem för återkoppling. Här är hur de omvandlar utvecklingen inom bilindustrin.
1. Fångar in rörelse från verkligheten: Den centrala rollen för linjär förflyttningsomvandlare
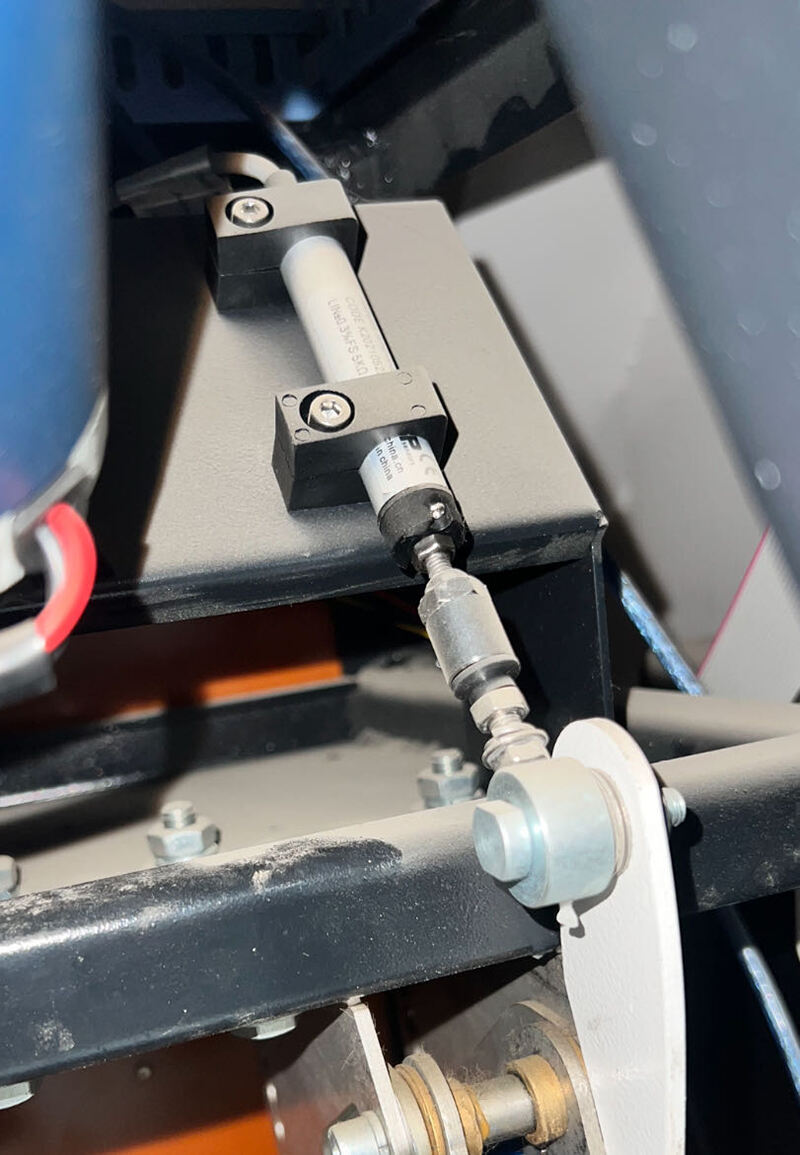
Linjära förflyttningsomvandlare är sensorer som omvandlar mekanisk rörelse till elektriska signaler. I körsimuleringar är de ofta fästa vid centrala komponenter som fjädringsarmar, styrspakar eller bromspedaler för att spåra förflyttning i realtid. När ett fordon till exempel träffar en holka kan en linjär förflyttningsomvandlare mäta hur mycket fjädern komprimeras och återfjädrar, och därigenom ge ingenjörer data om hur systemet absorberar stötar. Detta hjälper till att förbättra konstruktioner för komfort och säkerhet utan att behöva utföra faktiska vägtester.
2. Förbättra noggrannheten i provriggar: från statisk till dynamisk
Traditionell fordonstestning sker ofta i statiska miljöer, vilket begränsar insikterna om hur system beter sig i rörelse. Linjära förflyttningsgivare kompenserar detta genom att möjliggöra "körbara" testriggar – där ingenjörer kan "köra" en fordonskonfiguration medan sensorer registrerar varje rörelse. Till exempel kan en testrigg simulera kurvkrafter genom att förflytta hjulen via aktuatorer, medan linjära förflyttningsgivare mäter den resulterande karossvajen. Denna metod sparar tid och kostnader genom att återskapa dynamiska förhållanden i en kontrollerad laboratoriemiljö.
3. Stöd för avancerade fordonteknologier
När bilar utvecklas med elektrifiering och autonomi, linjära positionsomvandlare anpassa sig till nya utmaningar. I elfordon övervakar de expansionen av batteripack under termisk påfrestning, medan de i autonoma system säkerställer exakta aktuatorresponser för styrning eller bromsning. Genom att integrera data från linjära positionsomvandlare med beräkningsmodeller kan ingenjörer förutsäga hur fordon kommer att prestera i olika scenarier, från höghastighetsmanövrar till långsamma körningar i stadsmiljö.
4. Framtida riktningar: Integration med AI och simulering
Nästa gränsområde handlar om att sammanföra data från linjära positionsomvandlare med AI-drivna simuleringsverktyg. Tänk dig ett system där verkliga positionsdata flödar in i virtuella miljöer, vilket tillåter ingenjörer att testa tusentals körscenarier omedelbart. Detta kan snabba på utvecklingen av självkörande bilar, där varje millimeter rörelse är avgörande för säkerhetsalgoritmer.
Varför det är viktigt
Linjära positionsomvandlare är outfödda hjältar inom bilteknisk innovation. Genom att omvandla fysisk rörelse till användbar data bidrar de till fordon som är säkrare, mer effektiva och närmare den körupplevelse vi älskar. Oavsett om du är ingenjör eller bilentusiast formar dessa enheter tyst framtiden för mobilitet.
Om du har något behov av linjär förflyttningsomvandlare, skicka gärna en förfrågan till oss!