Někdy jste se zamysleli nad tím, jak inženýři dokážou napodobit pocit řízení automobilu, aniž by opustili laboratoř? Odpověď spočívá v chytrém inženýrství – konkrétně ve využití lineární snímače polohy k simulaci reálných jízdních podmínek. Tyto přístroje měří fyzický pohyb s vysokou přesností a jsou tak neocenitelné pro testování dynamiky vozidla, chování pérování i systémů zpětné vazby pro řidiče. Zde je, jak mění vývoj automobilů.
1. Zaznamenávání reálného pohybu: Základní role lineárního snímače polohy
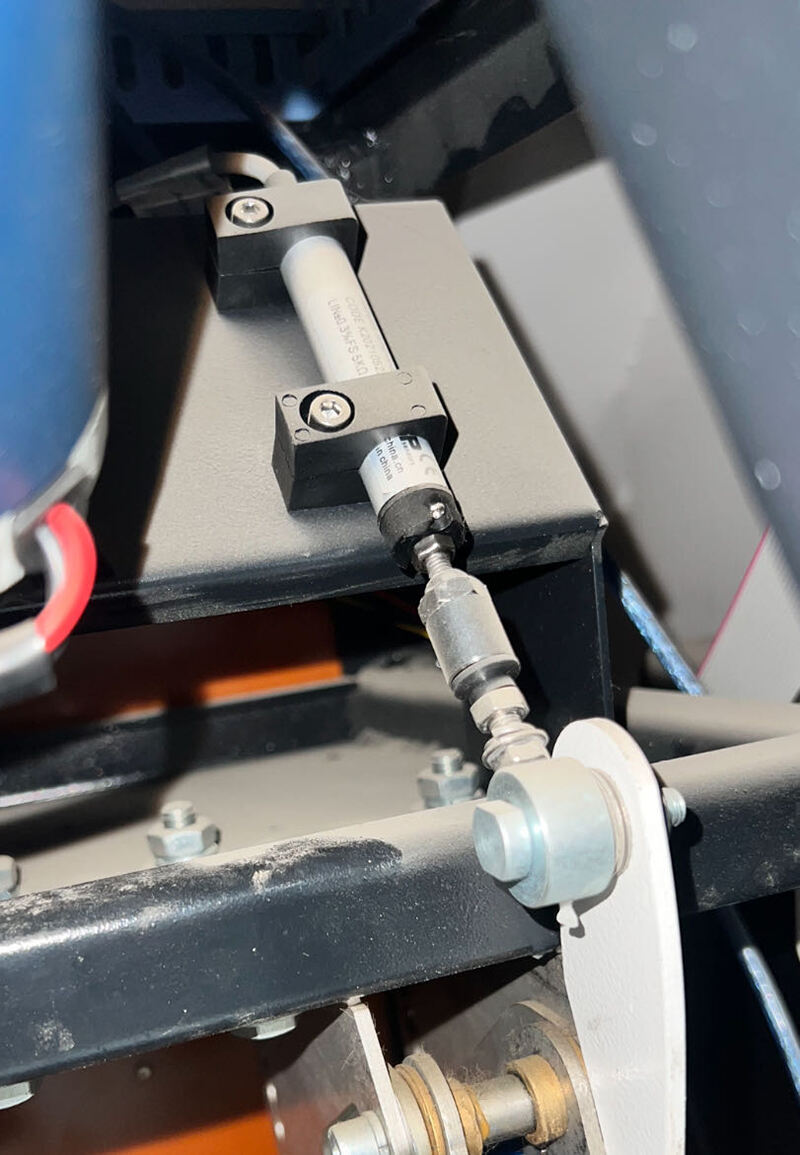
Lineární snímače polohy jsou senzory, které převádějí mechanický pohyb na elektrické signály. V simulacích řízení jsou často připevněny k klíčovým komponentům, jako jsou ramena zavěšení, řídicí sloupky nebo brzdové pedály, aby sledovaly posun v reálném čase. Například, když vozidlo najede na nerovnost, může lineární snímač polohy změřit, do jaké míry se zavěšení stlačí a vrátí zpět, a poskytnout tak inženýrům data o tom, jak systém tlumí nárazy. To pomáhá zdokonalovat návrhy z hlediska pohodlí a bezpečnosti, aniž by bylo nutné provádět skutečné jízdní testy.
2. Zvyšování přesnosti zkušebních zařízení: od statických k dynamickým
Tradiční testování vozidel často probíhá ve statických prostředích, což omezuje poznatky o chování systémů v pohybu. Lineární snímače polohy tento nedostatek eliminují tím, že umožňují použití „jízdních“ zkušebních zařízení – inženýři tak mohou „řídit“ sestavu vozidla, zatímco senzory zaznamenávají každý pohyb. Například zkušební zařízení může simulovat síly působící při průjezdu zatáčkou tím, že posouvá kola pomocí aktuátorů, zatímco lineární snímače polohy měří výsledný naklonění karoserie. Tento přístup šetří čas a náklady tím, že dynamické podmínky replikuje v kontrolovaném laboratorním prostředí.
3. Podpora pokročilých technologií vozidel
Jak se automobily vyvíjejí směrem k elektrifikaci a autonomii, lineární snímače polohy přizpůsobit se novým výzvám. V elektrických vozidlech (EV) sledují roztažení bateriového balení při tepelném namáhání, zatímco v autonomních systémech zajišťují přesné reakce aktuátorů pro řízení nebo brzdění. Integrací dat lineárních snímačů polohy s výpočetními modely mohou inženýři předpovídat, jak se vozidla budou chovat v různých scénářích – od jízdy na vysoké rychlosti až po jízdu ve městě při nízké rychlosti.
4. Budoucí směry: Integrace s umělou inteligencí a simulacemi
Další hranice spočívá v propojení dat lineárních snímačů polohy s nástroji pro simulaci řízené umělou inteligencí. Představte si systém, kde se data o reálném posunu v reálném čase přenášejí do virtuálních prostředí, což umožňuje inženýrům okamžitě testovat tisíce jízdních scénářů. To může urychlit vývoj autonomních vozidel, u nichž každý milimetr pohybu hraje klíčovou roli pro bezpečnostní algoritmy.
Proč je to důležité
Lineární snímače polohy jsou neoslavenými hrdiny automobilové inovace. Tím, že převádějí fyzický pohyb na využitelná data, pomáhají vytvářet vozidla bezpečnější, efektivnější a blíže k řidičské zkušenosti, kterou známe a milujeme. Ať už jste inženýr nebo automobilový nadšenec, tato zařízení tichounce formují budoucnost mobility.
Pokud máte jakoukoli potřebu po lineárním snímači polohy, zašlete nám prosím dotaz!